اموزش ساخت روبات
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیر یاب بسازیم با سلام خدمت دوستان گلم که میخوان یک روبات مسیر یاب حرفه ای بسازن برای ساخت یک ربات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشین در این وبلاگ سعی میشود نحوه ساخت یک ربات مسیر یاب به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود خوب بریم سر اصل مطلب که قراره در مورد مکانیک یک ربات مسیر یاب که فکر میکنم ساده ترین قسمت یک ربات مسیر یاب باشه توضیح بدیم مکانیک مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به برسی هر کدام می پردازیم 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد 2- موتور ربات مسیر یاب 3- چرخ ربات مسیر یاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد خوب دیگه بسه بریم سر اصل مطلب که میخوایم یکی یکی این اجزای مکانیکی رو تجزیه و تحلیل کنیم شاسی یا بدنه این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از : DC MOTOR Steper Motor شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید یک ربات باید از موتوری ( المیچر ) ی استفاده کند که داری قدرت بالا ( جریان کشی ) و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتونستید این جور موتوری را تهیه کنید میتوانید از یک آلمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود : ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ) که من توصیه میکنم این جور موتور هایی رو از این سایت که موتور های خوبی واسه این کار داره و هم ایرانی هست هم خیلی سریع بدستدون میرسه تهیه کنید : www.Shop.Farsitools.com Is Shoping Robotic چرخ ها در ساخت این جور رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از : -1 اندازه قطر چرخ , -2 اندازه عرض چرخ ,-3 اصطحکاک چرخ با زمین 1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور موتور روبات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند ...
آموزش ساخت روبات(جلسه2)
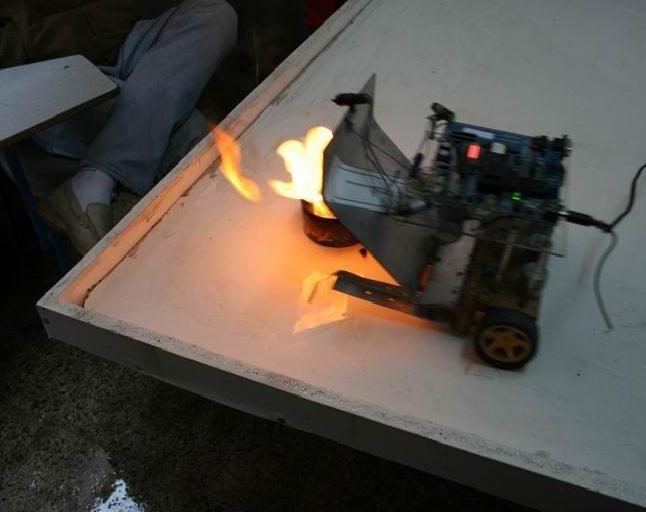
خوب ، وقت این رسیده که ببینیم این مطالبی که تا حالا کم و بیش یاد گرفتیم چه ارتباطی با کار ما داره، آیا این مطالبی که یاد گرفتیم همشون ضروری و مهم بودند ؟ از این به بعد چه چیزایی یاد می گیریم؟ و در نهایت قراره بعد از اموختن این مطالب به کجا برسیم؟ ما میخواهیم در ادامه یک دید کلی از یک ربات داشته باشیم تا متوجه بشویم که مطالبی که الآن ارایه می شوند، هر کدام در چه بخش هایی کاربرد دارند. شاید اولین سوالی که باید جواب داده بشه این هستش که ما می خواهیم در نهایت چه رباتی بسازیم؟ : ما قصد داریم به لطف خدا یک ربات آتش نشان را در پایان این دوره ها طراحی کرده و بسازیم. پس بد نیست ساختار یک ربات آتش نشان ساده رو با هم بررسی کنیم. در حالت کلی یک ربات شامل 3 بخش زیر می باشد: 1- ورودی ها: شامل همه ی سنسورهای مختلف ربات که اطلاعات محیط رو اعم از میزان نور، میزان گازهای مختلف، درجه حرارت محیط و.... دریافت و در در اختیار بخش پردازش گر ربات قرار می دهند 2- پردازش گر: اطلاعات ورودی ربات را دریافت و توسط مدارهای کنترلی(اعم از میکرو کنترولرها و مدارهای الکترونیکی دیگر) آنرا پردازش و تصمیم گیری می کند و تصمیمات رو در اختیار بخش های اجرایی ربات قرار می دهد. 3- خروجی ها(بخش های اجرایی): شامل موتورها، پمپ آب، LEDهای هشدار دهنده، آژیر خطر و... ابتدا ربات به وسیله ی سنسورهای نوری(نوعی مقاومت نوری) و بخش پردازشگر ابتدا مکان آتش را بر روی زمین مشابقه پیدا می کند. الگوریتم پیدا کردن آتش:(الگوریتم در اینجا به معنای راهکار حل مسآله می باشد) همان طور که میدونید یکی از مهمترین مشخصات آتش تابش نور و گرمای زیاد می باشد. مقاومت های نوری هم هر زمانی که نور بیشتری از محیط دریافت کنند مقاومت آنها کمتر می شود(در اینجا از مقاومت نوری به عنوان حسگر نور استفاده کردیم). ربات برای پیدا کردن آتش در ابتدا به صورت ثابت به دور خود می چرخد. یک مقاومت نوری نیز در جلوی ربات قرار دارد . هنگامیکه جلوی ربات در حین چرخش در مقابل آتش قرار بگیرد، نوری که به مقاومت نوری میرسد افزایش یافته و مقاومت آن کاهش می یابد. در نتیجه ربات توسط بخش پردازشگر وجود آتش را تشخیص می دهد. بخش پردازشگر دستور توقفِ چرخش و حرکت به سوی آتش را صادر می کند. این دستور توسط مدارهای واسط(در اینجا منظور مدارهایست که برای تقویت و کنترل جریان طراحی می شوند) به موتورها منتقل و اجرا می شود و ربات به سوی آتش حرکت می کند. الگوریتم خاموش کردن آتش: ربات در حال حرکت به سوی آتش می باشد،پس باید در یک فاصله ی مناسب از آتش که در آن فاصله به ربات اسیب نرسد بایستد و پمپ آب روشن کرده و آتش ...
آموزش ساخت روبات(جلسه10)

به نام خداسلام عرض مي کنم خدمت همه هي دوستاي خوبماين جلسه قراره انشاالله با هم ساخت يه ربات مسيرياب ساده (بدون ميکروکنترلر) رو با هم شروع کنيم.کار را ابتدا از قسمت مکانيک شروع مي کنيم، يعني بدنهي فيزيکي ربات سيستم حركت تانكتا حالا به حرکت يک تانک جنگي دقت کرده ايد؟ اگر دقت نکرده باشيد هم متوجه خواهيد شد که تانک، مثل خودروهاي شخصي معمولي داراي سيستم فرمان نيست، يعني براي چرخش در سر پيچ ها، چرخهاي جلوي آن به سمت خاصي متمايل نميشوند. پس تانکها چگونه حرکت ميکنند؟ به شکل زير نگاه کنيد سيستم حرکتي تانک به اين صورت است که در 2 طرف آن چند چرخ به وسيله ي يک تسمه ي فلزي ضخيم (به اصطلاح شني) به يکديگر متصل شدهاند، حرکت شنيها هر کدام جداگانه توسط رانندهي تانک کنترل ميشود و راننده عمل پيچيدن تانک به هر سمت را با توقف شني آن سمت انجام ميدهد. مثلاً اگر تصميم داشته باشد تانک به سمت چپ بپيچد، شني سمت چپ را متوقف کرده و شني سمت راست به حرکت خود ادامه ميدهد و در نتيجه تانک حول محور مشخصي (محور همان شني سمت چپ است) به سمت چپ ميپيچد.از مهمترين مزيتهاي اين سيستم نسبت به سيستم خودروهاي سواري، بالاتر بودن قدرت مانور آن در سر پيچها ميباشد، يعني با سيستم تانک ميتوان با سرعت بيشتري پيچها را پيمود.همچنين شبيهسازي اين سيستم در ابعاد کوچکتر بسيار سادهتر از سيستم خودروهاي معموليست. به همين خاطر ما در رباتها از همين سيستم به اصطلاح تانکي استفاده ميکنيم، اما با يک تغييرات جزيي. ما شني را از سيستم حذف ميکنيم، يعني دور چرخ ها تسمه اي نمياندازيم، زيرا اين تسمه براي کاربردهاي خاص طراحي شده و در ساخت يک ربات مسيرياب نيازي به آن نيست. همچنين چرخهاي جلو را نيز ميتوانيم حذف کرده و به جاي آن در فاصلهي بين 2 چرخ هرزگرد بگذاريم. (هرزگرد يک چرخ است که به هر جهتي ميتواند حرکت کند. در پايهي بعضي از مبلهاي خانگي و صندليهاي کامپيوتري از هرزگرد استفاده شده است.)شکل زير نماي کلي ربات ما است (ديد از زير) خود شاسي ربات نيز بهتر است از جنس MDF يا پلاستيک فشرده (پلکسي گلاس) باشد. براي اتصال موتورها به بدنه هم ميتوانيد از "ديوار کوب" لولههاي آب استفاده کنيد.الگوريتم تعقيب خط در يک ربات مسيريابربات مسيرياب ساده بايد قادر باشد يک خط مشکي رنگ به پهناي تقريبي 2 سانتيمتر را در يک زمينهي سفيد دنبال کند. البته در رباتهاي مسيرياب حرفهاي بحث خيلي پيچيدهتر شده و رباتها بايد قادر باشند حتي در بخشهايي از زمين مسابقه خط سفيد رنگ را در زمينهي سياه دنبال کنند.در جلسات قبل با سنسورهاي ...
ساخت روبات جنگجو

ربات های جنگجو یکی از جذاب ترین انواع ربات ها است که به علت عدم نیاز به دانش و آگاهی زیاد و با تکیه بر خلاقیت های بدیع، طرفداران زیادی دارد. اصول کلی طراحی این ربات ها بر اساس قوانین مسابقات و با تکیه بر خلاقیت هایی است که عموماً شامل طراحی مکانیکی آن می شود. و هرچه مکانیک ربات دقیق تر مورد بررسی قرار گرفته شده باشد، شانس برتری بیشتری نسبت به دیگر رقبا دارد. در این بین برای دوست داران اینگونه ربات ها، خواندن کتابی که حاوی نکات جالب و منتقل کننده تجربیات ناب باشد، بسیار ضروری به نظر می رسد. چرا که برای پیش برد ایده های ذهنی خود نیاز به ابزاری دارید که شناسایی این ابزار و راهنمایی های انجام گرفته، شما را بیش از پیش به اهدافتان نزدیک تر می کند. نوصیه ما به دوستان عزیزمان این است برای تحقق ایده های ذهنی خود، تا می توانید از مسیر علمی و با نظم از پیش طراحی شده، پیش بروید. کتاب زیر به نام Build your Own combat robot از انتشارات McGraw-Hill به چاپ رسیده و در عین حال آنکه کمی قدیمی به نظر می آید، اما از بهترین مراجع ربات های جنگجو است و حاوی نکات فراوان در طراحی و ساخت اینگونه ربات ها می باشد. دانلود فایل لینک دانلود نرم افزار شبیه سازی ربات جنگجو
آموزش ساخت روبات(جلسه 1)
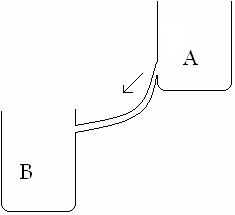
سلام بر همه ی شما دوستان برای درک بهتر مطالب سعی کنید مطالب رو به صورت متوالی و منظم دنبال کنید، چون مطالبی که ارایه می شوند کاملاً به هم مرتبط اند و اگر مطلبی رو متوجه نشوید، در بحث های بعدی نیز احتمالاً دچار مشکل خواهید شد. خوب، می دونم شما هم مثله من عجله دارید که زودتر وارد بحث اصلی بشیم، پس بدون حاشیه ی بیشتر شروع می کنیم. ما آنالوگ رو با معرفی 3 کمیت "اختلاف پتانسیل(V)"(Voltage)، "جریان(I) "(Current)و "مقاومت(R)"(Resistor) شروع می کنیم. البته این کمیت ها رو احتمالاً بخش زیادی از دوستان می شناسند زیرا هر 3 کمیت در بخش" الکتریسیته" ی "فیزیک 1 و ازمایشگاه" به تفصیل معرفی شده اند. اختلاف پتانسیل(V):ساده ترین تعریفی که برای (V) وجود دارد این است که اختلاف پتانسیل را عامل برقرار شدن جریان الکتریکی در مدار می دانند. برای اینکه شما این کمیت رو بهتر لمس کنید یک مثال ساده می زنم (البته این مثال در همه ی قسمت های بحث صادق نیست). فرض کنید 2 سطل آب در اختیار داریم با نام های "A"و"B" . سطل Aپر از آب و با اختلاف ارتفاع 1 متر بالاتر از سطل B قرار دارد. 2 سطل رو با یک شیلنگ به همدیگه وصل می کنیم. در این حالت مشاهده خواهیم کرد که اب از سطل A به درون B جاری می شود. حالا اگر جای 2 سطل رو با هم عوض کنیم جریان آب عکس می شود و از سطل B به سطل A جاری خواهد شد و اگر 2 سطل را هم ارتفاع کنیم ، هیچ جریانی نخواهیم داشت. یعنی این اختلاف ارتفاع عامل جاری شدن آب بین 2 سطل می باشد. در حقیقت در این مثال آب نقش الکترونها رو بازی میکنه و شیلنگ نقشه سیم، و AوB هم 2 قطب +و- باطری یا مولد الکتریکی. و در نهایت اختلاف ارتفاع بین 2 سطل هم نقش اختلاف پتانسیل بین 2 قطب رو بازی می کنند.یکای اختلاف پتانسیل "ولت" می باشد. جریان الکتریکی(I):برای تعریف جریان از مثال قبلیمون کمک می گیریم. در مثال بالا جریان آب نقش جریان الکتریکی را بازی میکنه (دقت کنید که سرعت الکترونها ثابت و تقریباً برابر سرعت نور می باشد ولی همونطور که می دونید سرعت آب در این مثال تابعی از شتاب جاذبه ی زمین(g) است.) . در حقیقت حرکت الکترونها بین 2قطب مولد را جریان الکتریکی می نامیم. یکای جریان به پاس خدمات علمی فیزیک دان فرانسوی "ماری آمپر" ،"آمپر(A)" نام گذاری شده است. مقاومت(R):مقاومت در حقیقت عاملی مزاحم برای جریان می باشد، یعنی هر چه مقاومت بیشتر باشد جریان کمتر است. برای مثال فرض کنید شما با عجله در حال دویدن در یک پیاده روی شلوغ هستید ، به طبع هر چی پیاده رو شلوغتر باشه حرکت برای شما سخت تر و کندتر خواهد بود. این شلوغی مزاحم مشابه همون مقاومت الکتریکی در یک سیم عمل میکنه.مقاومت الکتریکی رساناها (موادی که ...
آموزش ساخت روبات مسیر یاب
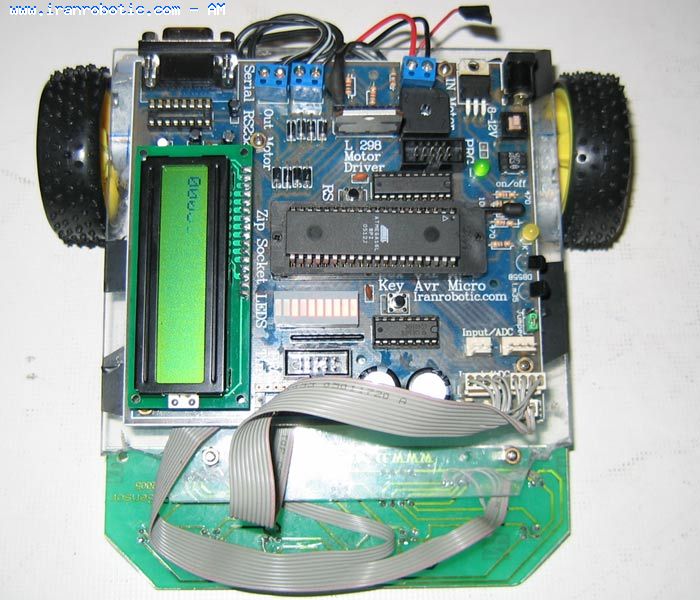
مقدمه برای ساخت یک ربات مسیریاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشیم. در این پروژه سعی میشود نحوه ساخت یک ربات مسیر یاب تشخيص رنگ به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود. ابتدا در مورد مکانیک یک ربات مسیریاب که معمولاً ساده ترین قسمت یک ربات مسیر یاب باشد توضیح داده ميشود. بخش دوم در مورد كليات قسمت الكترونيك و تشريح همهي المانهاي آن به طور كامل شرح داده شده است.در بخش سوم سعي شده است كه در مورد برنامهنويسي ربات به طور مختصر توضيح داده شود. در اين بخش در مورد دستورات برنامه مربوط به بخش مسيريابي و تشخيص رنگ توضيح مختصري داده شده است. بخش اول مكانيك ربات مكانيك ربات روبات شامل دو موتور در طرفين خود است که براي حرکت به جلو، بايد هر دو موتور روشن باشد. زمان دور زدن به چپ، موتور سمت چپ خاموش و موتور سمت راست روشن است و براي دور زدن به سمت راست، موتور سمت راست خاموش و موتور سمت چپ روشن ميشود. البته موتورهاي بکار رفته، DC موتور بوده و جهت کاهش سرعت و در نتيجه کنترل دقيق تر روبات از موتورهايي با گيربکس سرخود استفاده شده، که قيمت آن در بازار جمهوري تهران 7000 تومان است در صورتي که به اين نوع موتور دسترسي نداريد ميتوانيد از موتورهاي اسباب بازي گيربکس دار استفاده کنيد، در غير اين صورت بايستي خودتان گيربکس را بسازيد دقت داشته باشيد که دورنهايي چرخش چرخهاي روبات 60 دور بر دقيقه باشد. مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به بررسی هر کدام می پردازیم: 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد. 2- موتور ربات مسیریاب 3- چرخ ربات مسیریاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات را بر عهده دارد. * حال بايد به بررسي كامل قسمتهاي مكانيك ربات بپردازيم. 1-1 شاسی یا بدنه ربات این قسمت از مکانیک ربات مسیریاب وظیفه نگهداری تمام اجزا و مدارها را بر روی خود دارا میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتاً سبک باشد و بتواند این اجزا را تحمل کند. در اينجا از يك فيبر مدار چاپي استفاده شده است زيرا داراي زيبايي و سبكي بيشتري نسبت به موارد ديگر است. 1-2 موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از: 1- DC MOTOR 2- Steper Motor برای یک ربات مسیریاب به دو موتور خوب نیاز ميباشد که یکی برای چرخش به راست و دیگری برای چرخش به چپ. این موتور ها برا ي اينكه در پيچهاي ناگهاني و مسيرهاي پرپيچ وخم به راحتي بتواند دور ...
آموزش ساخت روبات
انواع ربات: مکانیک ربات: الکترونیک ربات: انواع موتور ربات امدادگر آموزش میکروکنترلر به زبان ساده منبع:http://atmegaavr.blogfa.com/
آموزش ساخت روبات(جلسه6)

با عرض سلام خدمت همه ی دوستای خوبم بدون مقدمه، بحث اموزش کار با بِرد بُرد (Breadboard) را شروع می کنیم. بردبُرد برد برد نوعی برد الکترونیکی است (مانند بردهای سوراخ دار) که به وسیله ی آن می توان اجزای الکترونیکی متعدد را به یکدیگر متصل کرد. در بردهای سوراخ دار معمولی، باید پس از نصب هر قطعه در برد، پایه های آنرا در برد لحیم کنیم، اما در برد برد ما نیازی به انجام لحیم کاری نداریم و فقط کافیست قطعه را روی برد برد قرار دهیم (با یک فشار کوچک قطعه روی برد نصب می شود). همچنین در بردهای سوراخ دار معمولی شما باید برای برقراری ارتباط بین آن ها، از سیم استفاده کنید، ولی در برد برد به صورت پیش فرض تعداد زیادی از اتصالات برقرار شده که شما فقط کافیست با در نظر گرفتن این اتصالات و قرار دادن قطعات در مکان های مناسب، مدار های خود را راه اندازی کنید. اما با این وجود، در بسیاری از موارد ما مجبور به استفاده از سیم های کمکی برای برقراری ارتباط ها می شویم. تصویر فوق یک مدار که روی یک برد سوراخ دار معمولی پیاده سازی شده است. تصویر یک مدار که بر روی یک بردبرد پیاده سازی شده. دقت کنید که علی رغم وجود ارتباط های فراوان در داخل خود بردبرد، از تعداد زیادی سیم کمکی نیز برای تکمیل مدار استفاده شده است. ارتباط های درون بردبرد: در این نوع برد، برای سهولت کار، ارتباطات زیادی بین سوراخ هایی که در بردبرد مشاهده می کنید، وجود دارد. در شکل زیر یک نمای کلی از سوراخ های متصل به هم در یک برد برد، ترسیم شده است. برای استفاده از آی سی ها، باید آن هارا در قسمت وسط طوری قرار دهیم که پایه های آن در 2 طرف با یکدیگر در تماس نباشند. 2 ردیف بالا و پایین نیز که به هم متصل هستند معمولاً برای تغذیه ی +و – برد استفاده می شوند. شما می توانید برای تمرین، یک LED را با یک مقاومت 100 اهم، روی بردبرد روشن کنید. آزمایش دوم: این آزمایش مربوط به مبحث خازن ها می شود و برای نشان دادن شارژ(پر شدن) و دِشارژ (خالی شدن) شدن یک خازن طراحی شده است. گام اول: مدار زیر را با توجه به جدول ببندید. C=2200µF C=1000µF C=470µF =T3 =T2 =T1 R=220? =T6 =T5 =T4 R=1K? زمان شارژ و دِشارژ با توجه به زمان روشن بودن LED ها، به ازای خازن های مختلف اندازه گیری نمایید. برای شارژ كردن خازن باید اتصال شماره ی 1 برقرار شود، زمان شارژ را میتوانید با توجه به مدت روشن بودن LED سمت چپ اندازه گیری نمایید برای دِشارژ كردن خازن، باید اتصال شماره ی 2(طبق شكل) برقرار شود. پس زمان دِشارژ را نیز میتوانید با توجه به مدت زمان روشن بودن LED سمت راست،اندازه گیری نمایید. همانطور كه مشاهده می كنید، با افزایش مقدار ...