کنترلر pid
-176. کنترل کننده PID Controller - PID

تاریخ آخرین بروزرسانی در متن یا نظرات این پست: هفتم اردیبهشت ۹۳ PID Controller ... ! سلام به مرور مطالب مفیدی در این باره قرار خواهم داد... - PID Controller چیست؟ مخفف Proportional - Integral - Derivative می باشد ... - لینک های آموزشی: PID Controller Design PID Controller Architectures کنترل کننده PID و تنظیم پارامترهای آن در سیمولینک (فارسی) - طراحی اصلاح شده کنترل کننده PID برای درایوهای موتور DC با استفاده از PSOمنبع: sadeghkhani.ir - کنترل کننده PID با استفاده از الگورتیم مورچگان در متلب (ایمیل بزنید) - یک نمونه از تنظیم بهره PID با شبکه عصبی در متلب http://neural-network.blogfa.com/cat-17.aspx - فرمول PID دیجیتال برای پیاده سازی در میکروکنترلر مطالب مرتبط:-107. راهنمای نرم افزار MATLAB-57. کار با سریال پورت در مطلب - MATLAB-62. آموزش نرم افزار متلب MATLAB و سیمولینک Simulinkا-133. آشنایی با استانداردهای پورت سریال RS485 , RS422 , RS232- نمونه برنامه تنظیم بهره یا ضرایب PID کنترلر با شبکه عصبی در MATLAB
کنترل کننده PID
کنترل کننده PID، که یک کنترل کننده سه بخشه، شامل بخش های تناسبی، انتگرال گیری، و مشتق گیری است، پر کاربرد ترین کنترل کننده در صنعت است، به طوری که حدود نود درصد کل کنترل کننده های مورد استفاده در صنعت، یا PID هستند، و یا از آن در ساختار های کنترلی دیگر استفاده می کنند. این امر به تنهایی گویای اهمیت این کنترل کننده است.بر خلاف ظاهر ساده PID، طراحی این کنترل کننده، در عمل، فراتر از تنظیم سه پارامتر اصلی آن است. عوامل مختلفی در عملکرد این کنترل کننده تاثیر گذار اند، که از جمله ساختار کنترل کننده، درجه پروسه، نسبت ثابت زمانی غالب سیستم به زمان مرده پروسه، دینامیک عنصر محرک، نوع فیلتر بخش مشتق گیر و تنظیم پارامتر آن، رفتار غیر خطی در سیستم و غیره را می توان برشمرد. هر یک از این عوامل می توانند نقشی در روند طراحی و تنظیم کنترل کننده PID داشته باشند.از این میان، دو مسئله مهم، عبارت اند از: طراحی فیلتر بخش مشتق گیر، و جبران آثار اشباع شدن عنصر محرک. پروژه حاضر به بررسی مفصل این دو می پردازد. اما پیش از آن، مبانی و اصول کنترل PID، اصلاحات اساسی در قانون پایه این کنترل کننده، ساختار های مختلف و منطق حاکم بر سه عمل آن، و نیز راهکار هایی برای انتخاب نوع کنترل کننده، معرفی و بحث می شوند.در بخش طراحی فیلتر مشتق گیر، تاکید اساسی بر طراحی کنترل کننده بر اساس چهار پارامتر (سه پارامتر اصلی PID و چهارمی ثابت زمانی فیلتر) است. اهمیت این مطلب با شبیه سازی های مختلف روشن شده است. علاوه بر این، ساختار های اصلی PID در مورد عملکرد فیلتر با هم مقایسه شده، و راهبرد طراحی درست بحث شده است. بخش اصلی دیگر، به روش های مقابله با آثار اشباع شدن عنصر محرک می پردازد. در این مورد چندین تکنیک معرفی، و با هم مقایسه شده اند، که تکنیک های انتگرال گیری شرطی، و محاسبه معکوس از آن جمله اند. در اکثر بحث ها و بررسی ها، آسان بودن ساخت و کاربرد، و نیز رسیدن به عملکرد لازم با کمترین هزینه، مورد توجه بوده است. نتایج به کار گیری برخی از این روش ها، در شبیه سازی های انجام شده آمده است.Proportional-Integral-Derivative controllers are the most widely used ones in industry, actually, more than ninety percent of all the implemented controllers are PID controllers, this obviously shows the PID controller importance.In spite of its relative simplicity, the design of the PID controller is not limited to tuning of its three coefficients. Various factors, including controller structure, process degree, ratio of dead-time to dominant time constant, derivative filter design and its tuning, integrator windup and system non-linearity, etc, can affect the controller performance.Among these factors, two important ones are: Derivative filter design, and integrator windup effect, which we will discuss in detail in this project.First of all, basics of PID control, its different structures, and some modifications of the basic PID control law, along with some ...
همه چیز راجع به کنترلر دما DTC1000 دلتا – PID Controller

یکی از بهترین و کم هزینه ترین راه های کنترل و مانیتور دما در صنعت استفاده از کنترلر دما DTC1000 است . این کنترلر ویژگی های بسیار فوق العاده ای دارد که در سی دی آموزشی و کلاس خصوصی به آموزش آن پرداخته می شود . جهت یادگیری کامل ، این آموزش در قابل تعدادی فیلم آموزشی تهیه شده است تا شما با کلیه مراحل نصب ، برنامه نویسی ، سیم بندی و راه اندازی این کنترلر دما آشنا شوید . آموزش اتصال سنسور به DTC1000 آموزش مانیتورینگ دما در HMI پنل مستر آموزش ساخت کابل ارتباطی بین مانیتور و کنترلر آموزش کار با نرم افزار DTCOM آموزش راه اندازی نمودار دما آموزش استفاده از خروجی های کنترلر در حالت های مختلف آموزش تنظیم پارامترهای پیشرفته کنترلر از روی مانیتور بدون اتصال به نرم افزار DTCOM آموزش ساخت کابل برنامه نویسی DTC1000 از مهمترین ویژگی های این کنترلر می توان به مستقل بودن آن نسبت به CPU اشاره کرد . شما می توانید با تنظیم پارامترها ، برای خروجی و آلارم برنامه ریزی کنید . حتی این امکان برای شما فراهم است که خروجی ها را در حالت های مختلف از جمله PID کنترل کنید . همچنین این امکان وجود دارد تا شما تعداد بیشتری از دماها را مانیتور و کنترل کنید . جهت کسب اطلاعات بیشتر می توانید با شماره 09112754501 تماس بگیرید . ایمیل : [email protected] [email protected] موفق باشید .
کنترلر پی آی دی
قبل از توضيحات در رابطه با کنترلر PID بد نيست بدانيم که اصولاً کنترلر وظيفه مقایسۀ مقدار واقعي پروسه با مقدار مطلوب يا نقطه تنظيم و همچنين صدور فرمان براي اکچوئيتور جهت انجام اين تنظيم را دارد . براي مثال در کنترلرهاي ساده نظير ترموستات که سنسور که وظيفه اندازه گيري دما را دارد معمولاً از يک بيمتال تشکيل شده است و در حقيقت اين بيمتال با توجه به کم يا زياد شدن دما به يک طرف متمايل شده با تنظيم مناسب جهت دماي مطلوب خروجي کنترلر که همان فرمان خاموش يا روشن کردن منبع حرارتي است صادر ميشود .اما در يک کنترلر PID با در نظر گرفتن پارامترهائي نظير نسبت تغييرات نقطه تنظيم با مقدار فعلي پروسه با فاکتورهائي نظير شدت تغييرات ناگهاني ، و ميزان تغييرات نسبت به زمان ميتواند کنترلي پيشرفته خصوصا در پروسه هاي دمائي که استفاده از کنترلرهاي ساده باعث ايجاد نوسان دائمي دما ميشود را ايجاد کند . در کنترلر پي آي دي از الگوريتم نسبي ، مشتقي ، و انتگرالي بهره ميبرند همانگونه که نام آن از P مخففProportional يا نسبي و فاکتور I مخفف integral يا انتگرالي و فاکتور D مخفف Derivative يا مشتقي گرفته شده است .و در بسياري از فرايندهاي کنترلي نظير کنترل سرعت موتور DC ، کنترل فشار، کنترل دما و ... کاربرد دارد.
آدمها و كنترلر PID
گاهی میشود آدمها را شبیه یک کنترلر PID در نظر گرفت. معمولا ضریب Pیشان زیاد است و در نتیجه تا به عقیدهای برسند حسابی نوسان عقیدتی دارند. یک روز میگویند آب سرد است، فردا میگویند گرم است، روز بعد میگویند سرد است، فردایاش میگویند گرم است تا اینکه آخر سر به این نتیجه برسند که ولرم است گاهي ميشود آدمها را شبيه يك كنترلر PID در نظر گرفت.معمولا ضريب Pيشان زياد است و در نتيجه تا به عقيدهاي برسند حسابي نوسان عقيدتي دارند. يك روز ميگويند آب سرد است، فردا ميگويند گرم است، روز بعد ميگويند سرد است، فرداياش ميگويند گرم است تا اينكه آخر سر به اين نتيجه برسند كه ولرم است! بعضيها هم كه ضريب D دارند و كافي است ناگهان متوجه بشوند كه تصور فعليشان از حقيقت خيلي با آنچه مشاهده ميكنند فرق دارد كه ديگر شروع كنند به كفر گفتن. بعضيها هم ضريب I در زندگيشان تاثيرگذار است و آرام آرام نظرشان عوض ميشود ولي در نهايت حسابي ميچسبند به آنچيزي كه ديدهاند. بقيهي اوقات كه آدمها شبيه كنترلر PID نيستند، لازم است با مدلهاي پيچيدهتر توضيحشان داد! (; توضيح مختصر: كنترلر چيزي است براي كنترل كردن چيزها. چيزها هم يعني چيزهايي مثل هواپيماي جت، بچه، ترميناتور و غيره.اساس كار كنترلر اين است كه با مشاهدهي تفاوت بين نتيجهي كار آن چيز و آنچه بايد باشد، تغييري در آن چيزها(!) ايجاد كند تا در نهايت تفاوت از بين برود. در واقع كنترلر نقش تربيتي دارد.كنترلر PID بر اساس سه مشخصه از آن تفاوت اين تغيير را ايجاد ميكند. مشخصهي اول ميزان تفاوت است. هر چه تفاوت بيشتر باشد، كنترلر سعي ميكند تغييرات بيشتري در آن چيز(!) ايجاد كند (اين بخش Proportional كنترلر PID است). مشخصهي دوم، كل تفاوت در طول زمان است. اگر گذشتهي يك چيزي خوب نبود لازم است همچنان به تغيير در آن چيز اهتمام ورزيد. نتيجهاش اين ميشود كه اگر احساس كرديم يك چيزي خوب شده است اما بدانيم كه در گذشته بد بوده، نبايد يكهو فكر كنيم كار تمام شده و برويم پي كارمان. همچنان بايد مثل قبل (حالا كمي رقيقالقلبتر) با آن چيز رفتار كنيم (اين بخش Integrator كنترلر است). در نهايت اگر ببينيم تفاوت بين كمال مطلوب(!) و هستِ واقع(!) ناگهان زياد (كم) شد، ما هم بايد ناگهان در تصميممان تغيير ايجاد كنيم. بخش سوم كنترلر PID (يعني بخش Derivative) به اين تغييرات توجه ميكند.به عنوان مثال عملي فرض كنيد ميخواهيد بچهتان را تربيت كنيد تا دست توي دماغاش نكند. اينكار را با شكلاتدادن و كتكزدن انجام ميدهيد. بخش P ميگويد هر وقت بچه دست توي دماغاش كرد، به ميزان فرورفتن انگشت ...
پروژه كنترل كننده pid با AVR
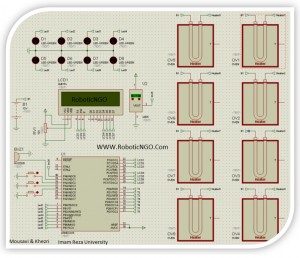
دانلود پروژه كنترل كننده pid با AVR امروز یک پروژه جالب به نام کنترل کننده PID طراحی کردم، که هدف من از این پروژه پیاده سازی کنترلر PID با استفاده از میکروکنترلر AVR می باشد. من این پروژه را تا آنجایی که بتوانم به زبان ساده توضیح خواهم داد که افراد مبتدی هم متوجه قضایای این کنترلر PID شوند. و اما اول اینکه کنترل کننده PID چیست؟ PID مخفف Proportional Integral Derivative می باشد. کنترل PID یعنی عمل کردن بر روی متغییر مورد کنترل از طریق ترکیب مناسب سه عمل کنترلی تناسبی، انتگرالی، مشتق گیر، که به شرح زیر میباشد: تناسبی: که در آن عمل کنترل با سیگنال خطای محرک که برابر تفاضل میان سیگنال ورودی و سیگنال پس خور است متناسب می باشد. انتگرالی: که در آن عمل کنترل با انتگرال سیگنال خطای محرک متناسب است. مشتق گیر: که در آن عمل کنترل با مشتق سیگنال خطای محرک متناسب است در صورت خراب بودن فایل، در قسمت نظرات به ما اطلاع دهید وبسایت مهندسی برق قدرت(علی ایمنی) www.alieimany.blogfa.com www.alieimany.ir امروز یک پروژه جالب به نام کنترل کننده PID طراحی کردم، که هدف من از این پروژه پیاده سازی کنترلر PID با استفاده از میکروکنترلر AVR می باشد. من این پروژه را تا آنجایی که بتوانم به زبان ساده توضیح خواهم داد که افراد مبتدی هم متوجه قضایای این کنترلر PID شوند. و اما اول اینکه کنترل کننده PID چیست؟ PID مخفف Proportional Integral Derivative می باشد. کنترل PID یعنی عمل کردن بر روی متغییر مورد کنترل از طریق ترکیب مناسب سه عمل کنترلی تناسبی، انتگرالی، مشتق گیر، که به شرح زیر میباشد: تناسبی: که در آن عمل کنترل با سیگنال خطای محرک که برابر تفاضل میان سیگنال ورودی و سیگنال پس خور است متناسب می باشد. انتگرالی: که در آن عمل کنترل با انتگرال سیگنال خطای محرک متناسب است. مشتق گیر: که در آن عمل کنترل با مشتق سیگنال خطای محرک متناسب است چه موقع باید از کنترلر PID استفاده کنیم؟ بهترین مثال برای روشن شدن این قضیه کنترل دمای یک هیتر می باشد که در پروتیوس هم این هیتر برای شبیه سازی وجود دارد. همانطور که می دانیم وقتی که ما هیتر را روشن می کنیم عوامل زیادی در دمای آن نقش دارند مثلا هیتر در فضای باز قرار دارد یا در فضای بسته و یا اینکه اندازه ابعاد اتاق چقدر است و ... خلاصه وقتی ما سیگنالی به هیتر اعمال می کنیم دما کم کم شروع به بالا رفتن می کند بعد از مدتی دیگه با اعمال تعدادی پالس مشخص دما به صورت تناسبی بالا نمی رود و می بینیم که دما به طور چشمگیری خود به خود بالا می رود و کنترل آن از دست ما خارج می شود. این مسئله را می توانید در پروتیوس به صورت عملی اجرا کنید که من آن را به صورت فایل جداگانه در پوشه Test_heter گذاشتم. می بینیم ...
دانلود پروژه طراحی کنترلر PID سیستمی ابداعی
مطالبی که در این پروژه قرار دارند به شرح ذیل می باشد : مدلسازی سیستم به چندین روش ، شامل : دو پارامتری ، سه پارامتری ، چهار پارامتری طراحی PID با استفاده از Parameter Search طراحی PID با استفاده از روش زیگلر-نیکولز در دو حوزه ی زمان و فرکانس گسسته سازی سیستم برای تبدیل حالت آنالوگ به دیجیتال به 3 روش شامل (Forward Difference=F.D ، Backward Difference=B.D ، Tustin) بررسی اثر Windup در سیستم های کنترلی ، همراه رسم بلوک دیاگرام طراحی کنترلر به روش IMC (از طریق فرمول و Simulink-MATLAB) طراحی کنترلر توسط جایابی قطب طراحی کنترلر به روش شکل دهی حلقه(Loop Shaping)، (از طریق فرمول و Simulink-MATLAB) رسم نمودار پله ، ضربه ، بود و نایکوییست در تمامی مراحل ذکر شده با استفاده از نرم افزار MATLAB تاثیر اثر نویز و اغتشاش در تمامی مراحل فوق این نکته قابل تاکید است ، که این سیستم فقط یک سیستم ابداعی بوده و وجود خارجی ندارد ، و تمامی محسبات انجام شده توسط شخص نویسنده انجام شده است ( هیچ گونه کپی برداری صورت نگرفته است)، و هدف از قرار دادن آن در سایت ، فقط آشنایی دانشجویان گرامی با طراحی کنترل کننده است ، که بتوانند هر کنترلری را به این طریق به سادگی طراحی کنند. برای اطلاع از نحوه دانلود این پروژه می توانید با ایمیل [email protected] ارتباط برقرار نمایید.
کتابچه ای درباره طراحی ، تنظیم و پیاده سازی کنترل کننده های PID
دانلود کتابچه ای درباره کنترلر های PIDرمز:www.newtechweb.blogfa.com
کنترل دمای محیط با PID کنترلر
این سیستم به گونه ایست که دمای محیط را در حد دمای مورد نظر کاربر تنظیم و ثابت نگاه می دارد .این کنترل دما به وسیله ی یکی از روش های کنترلی یعنی PID کنترل انجام می شود .سه استراتژی اعمال کنترل، که کلیه روش های کنترلی به نحوی جزء یکی از آن ها هستند، شامل کنترل حلقه باز، کنترل پیش خور و کنترل فیدبک یا پس خور می باشد.الگوریتم PID نیز از رایج ترین نمونه های الگوریتم کنترل بازخوردی است که در بسیاری از پروسه های کنترلی نظیر : کنترل سرعت موتور DC،کنترل فشار، کنترل دما و … کاربرد دارد.برای طراحی یک سیستم مبتنی بر کنترل PID ، سه پارامتر :۱-بهره تنا سبی Kp2-بهره انتگر الی Ki3-بهر ه مشتقی Kdدر نظر گرفته میشود.البته روش سنتی طراحی نیز همان روش سعی و خطاست.از معایب کنترل PID میتوان به پیچیدگی و زمان بر بودن آن اشاره نمود. روش های جدید نیز برای طراحی کنترلر PID، روش های تکاملی می باشند.توضیحات کامل