دانلود پروژه سیمولینک
دانلود پروژه رایگان سلول خورشیدی در سیمولینک MATLAB
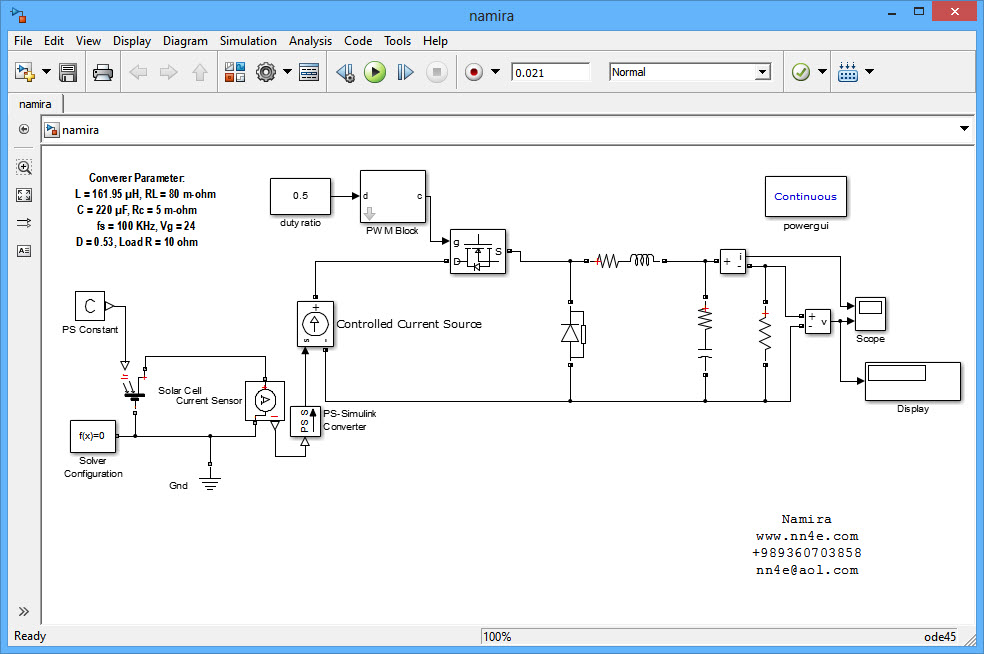
دانلود پروژه رایگان سلول خورشیدی در سیمولینک MATLAB لینک دانلود مستقیم پروژه لینک دانلود پروژه از دراپ باکس لینک دانلود پروژه از هکس آپلود لینک دانلود ویدئوی اجرای پروژه از دراپ باکس لینک دانلود ویدئوی اجرای پروژه از هکس آپلود عکس 1 عکس 2 عکس 3 عکس 4
آموزش سیمولینک در MATLAB
سیمولینک بسته ای نرم افزاری برای مدل سازی ، شبیه سازی و تجزیه و تحلیل سیستم های دینامیکی در نرم افزار MATLAB می باشد.موارد استفاده از سیمیولینک عمومی هستند و مانند بسیاری دیگر از نرمافزارهای شبیه سازی مهندسی، منحصر به کاربردهای خاصی نیست. که این مورد مزایا و معایب متفاوتی را برای سیمیولینک ایجاد میکند.سیمیولینک را نمیتوان جداگانه اجرا کرد. برای اجرای آن باید در ابتدا متلب را اجرا کرد و سپس در آن با تایپ دستور simulink برنامه اجرا میشود. میتوان متغیرها را در متلب تعریف کرده و از آنها در سیمولینک استفاده کرد.در این مطلب، یک بسته آموزشی simulink برای شما عزیزان قرار داده شده است؛ که مهم ترین آن کتاب Introduction to simulink می باشد. جهت دانلود این بسته آموزشی بر روی لینک زیر کلیک کنید. دانلود بسته آموزش سیمولینک MATLAB پسورد فایل فشرده: www.mhm20.blogfa.com
دانلود پروژه کنترل خطی چرخ
دانلود پروژه کنترل خطی چرخ دانلود پروژه کنترل خطی چرخ اگر از اینرسی چرخ صرف نظر کنیم در اینصورت sys به جرم و دمپر تبدیل میشود Y(s)/U(s)=1/(1000s+50) Y(s)=سرعت U(s)=نیرو پاسخ حلقه باز به ورودی پله ای(نیروی برابر 500نیوتن) کنترل کننده PID با شرایط 1)وقتی نیروی موتور 500نیوتن حداکثر سرعت باید برابر 10 متر بر ثانیه باشد 2)زمان خیز باید کمتر از 5ثانیه باشد(risetime) 3)جهش کمتر از 10درصد خطای حدود 2درصد در حالت ماندگار قابل قبول است مطلوبست: بدست آوردن صفر و قطب های حلقه باز بدست آوردن صفر و قطب های حلقه بسته در حضور کنترل کننده PID رسم مکان هندسی ریشه ها رسم دیاگرام نایکوییست حل: ابتدا کد زیر را در متلب وارد می کنیم: clearall; clc; num=[1]; den=[1000 50]; g=tf(num,den); [z,p,k]=tf2zp(num,den); sisotool(g) این کد می تواند صفرها و قطبهای تابع حلقه باز را نمایش دهد: z = Empty matrix: 0-by-1 p = -0.0500 k = 1.0000e-003 همانطور که در جواب فوق دیده می شود صفر نداریم و تنها یک قطب در -0.0500 داریم و نیز بهره برابر 1.0000e-003 است. حالا برای یافتن صفر و قطبهای کنترلر مان از ابزار SISOTOOL کمک می گیریم: یک عدد قطب و یک صفر انتخاب می کنیم و آنقدر آنها را جابجا می کنیم تا تمامی خواسته های مسئله برآورده گردد: همانطور که در شکل می بینید زمان نشست کمتر از 5 ثانیه شده است. یکی دیگر از خواسته های مسئله اورشوت است که باید زیر ده درصد باشد این امر هم محقق شده است: سیستم زیر نمایش دهنده سیستم مورد دلخواه ماست که کنترلر PID آن یک قطب در 56 ویک صفر در 8.8 داردو گین آن 4432 است نمودار مکان هندسی این سیستم این گونه می شود: دیاگرام بود این سیستم نشان از پایداری سیستم دارد: همانطور که می بینید گین مارجین و فیز مارجین هر دو در حدود خود قرار گرفته اند وسیستم پایدار است البته این امر را می توانستیم پیش بینی کنیم چون هیچ صفر و قطبی در سمت راست محور کار نگذاشته ایم دیاگرام نایکویست این سیستم به شرح زیر است: صفر و قطب تابع حلقه بسته: برای اینکار هم از کدهای زیر استفاده نمودیم: clearall; clc; num=[1]; den=[1000 50]; g=tf(num,den); [z,p,k]=tf2zp(num,den); [num2,den2]=zp2tf(-1/8.8,-1/56,4432); [numf,denf]=feedback(num,den,num2,den2); F=tf(numf,denf) [z2,p2,k2]=tf2zp(numf,denf) که جواب به صورت زیر شده است: Transfer function: s + 0.01786 ————————- 1000 s^2 + 4500 s + 504.5 z2 = -0.0179 p2 = -4.3848 -0.1151 k2 = 1.0000e-003
آموزش سیمولینک (آیتی نیا)
در ادامهی آموزش Simulink ، مثالی رو مطرح میکنم که بیشتر با دقایق و ظرایف این نرم افزار آشنا شوید. فرض کنید سیستمی کنترلی دارید که تابع تبدیل آن در دسترس نیست و میخواهید مقدار ثابتزمانی این سیستم را بدست آورید. برای این منظور به ورودی سیستم، پله داده و ثابتزمانی را از روی خروجی سیستم اندازه میگیریم. حال پنجرهای جدید باز کرده و بلوکهای زیر را وارد آن کنید: Simulink >> Sources >> Step Simulink >> Sources >> Clock Simulink >> Sinks >> Stop Simulation Simulink >> Sinks >> Scope Simulink >> Continuous >> Transfer Fcn Simulink >> Sources >> Constant Simulink >> Sinks >> Display Simulink >> Logic and Bit Operations >> Relational Operator حال بلوکها را مانند شکل زیر مرتب کرده و سیم کشی کنید: توضیح مدل: در واقع ما خروجی این سیستم را با مقدار مقایسه کردهایم و هرگاه که خروجی به این مقدار رسید، خروجی بلوک مقایسهگر 1 شده و بلوک Stop Simulation شبیهسازی را متوقف میکند. حال قطعا مقدار زمان شبیهسازی، برابر مقدار ثابتزمانی سیستم خواهد بود. در مثال بعدی میخواهم یک مدار مقسم فرکانس با فلیپ فلاپ T ایجاد کنم. آنطوری که من در کتابخانه سیمولینک گشتم، این FF وجود نداشت. پس مجبوریم از فلیپ فلاپ JK استفاده و دو پایه آن را بههم وصل کنیم. در این مدار ما از چهار عدد FF استفاده کردهایم در نتیجه در خروجی FFها بهترتیب سیگنالهایی با فرکانسهای 2/1 ، 4/1 ، 8/1 و 16/1 فرکانس ورودی خواهیم داشت. بلوکها: Simulink >> Sinks >> Scope Simulink >> Sinks >> Terminator Simulink >> Sources >> Constant Simulink >> Signal Attributes >> Data Type Conversion Simulink >> Simulink Extras >> Flip Flops >> Clock Simulink >> Simulink Extras >> Flip Flops >> J-K Flip-Flop حال بلوکها را مانند شکل مرتب کرده و سیمکشی کنید و تنظیمات لازمه را بر مبنای آنچه که در ادامه آمده است، اعمال کنید: تنظيمات بلوکها: روي بلوك Constant دوبار كليك نموده و در تب Signal Attributes نوع داده خروجی را boolean برگزینید روي بلوك Clock دوبار كليك نموده و مقدار پریود آن را 0.2 قرار دهید روي تمامی بلوكهای Data Type Conversion دوبار كليك نموده و در قسمت Output data type نوع دادهي خروجي را double انتخاب كنيد روي بلوك Scope دوبار كليك نموده و سپس به منوي Parameters رفته و تعداد محورها را برابر 5 قرار دهيد اینک میتوانید مدلتان را اجرا کنید توجه: جهت اینکه نمودارها را بطور کامل و واضح ببینید، روی تمامی نمودارها راست کلیک کرده و گزینه Axes properties را انتخاب و سپس تغییرات شکل زیر اعمال کنید:در مثال بعدی میخواهم یک مالتی پلکسر 4 به 1 را با استفاده از بلوکهای شرطی، پیادهسازی کنم. همانطور که میدانید ...
آموزش سیمولینک 3
قسمت سوم آموزش رو با مثالي از اعداد مختلط شروع ميكنيم ميخواهيم سيستمي طراحي كنيم كه دو عدد مختلط را گرفته و چهار عمل اصلي رياضي(جمع، تفريق، ضرب، تقسيم) را روي آن دو انجام دهد و همچنين قسمت حقيقي، قسمت موهومي، اندازه، فاز و مزدوج يكي از آن دو عدد را محاسبه كند توجه داشته باشيد كه هدف از اين مثال يادگيري كار با اعداد مختلط و نحوه ايجاد زير سيستم است. طبق معمول ابتدا يك پنجره جديد باز كرده و بلوكهاي مورد نياز را از مسيرهاي زير وارد ميكنيد: Simulink >> Sources >> Constant Simulink >> Sinks >> Display Simulink >> Math Operations >> Sum Simulink >> Math Operations >> Gain Simulink >> Math Operations >> Product Simulink >> Math Operations >> Divide Simulink >> Math Operations >> Complex to Real-Imag Simulink >> Math Operations >> Real-Imag to Complex Simulink >> Math Operations >> Complex to Magnitude-Angle تنظيمات بلوكها: روي بلوك Constant دوبار كليك نموده و مقدار آن را 2+3i و نام آن را z قرار دهيدروي بلوك Constant1 دوبار كليك نموده و مقدار آن را 3-6i و نام آن را z1 قرار دهيدروي بلوك Gain دوبار كليك نموده و مقدار آن را 1- قرار دهيدروي بلوك Sum1 دوبار كليك نموده و در قسمت List of signs علامتهاي -+| را وارد كنيدروي بلوكهاي Display كليك راست نموده و از مسير Format >> Hide Name نام بلوكها را پنهان كنيدسپس تمامي بلوكها بهجزء بلوكهاي Constant و Display را انتخاب و كليك راست كنيد و از منوي باز شده Create Subsystem را انتخاب كنيد حالا مدلتان احتمالا كمي بهمريخته شده است كمي آن را مرتب كنيد و بلوك Subsystem را از دو طرف بكشيد تا بزرگتر شود برخي از بلوكهاي Display نيز احتياج به بزرگترشدن دارند كه اين را بعد از شبيهسازي خواهيد فهميد. نكته: شما ميتوانيد با دوبار كليك كردن در هرجايي از مدلتان، متني دلخواه وارد كنيد مثلا كنار هر كدام از بلوكهاي Display بنويسيد كه چه عددي را قرار است نشان دهند ضمنا ميتوانيد با دوبار كليك كردن به روي هر سيگنالي، آن را نامگذاري كنيد. اكنون سيستم شما آماده شده و ميتوانيد آن را Run كنيد: در اين مثال با نحوهي ايجاد زيرسيستم آشنا شديد شما ميتوانيد زير سيستمهاي مختلفي در يك مدل(حتي زيرسيستمهاي تودرتو) ايجاد كنيد زيرسيستمها را معمولا براي مدلهاي پيچيده و شلوغ بهكار ميبرند و با دوبار كليك كردن بهروي هر كدام از آنها، محتويات آن مشاهده خواهد شد. در مثال بعدي ميخواهيم پاسخ پله و پاسخ ضربه يك سيستم كنترلي را مشاهده كنيم تابع تبديل سيستم به شرح زير است: اين سيستم درجه 3 است و اگر پاسخ پله آن را رسم كنيم خواهيم ديد كه پاسخ زيرميرا(سينوسي ميراشونده) ميباشد ضمنا مي ...
دانلود رایگان تاثیر خطوط موازی
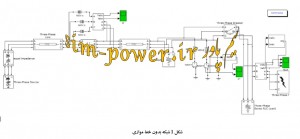
دانلود رایگان تاثیر خطوط موازی بر روی سایت سیم پاور در نظر دارد برخی از پروژه های قدیمی خود را جهت آشنایی بهتر مخاطبین با این سایت به صورت دانلود رایگان در اختیار عموم بگذارد. تاثیر خطوط موازی بر روی برق گیر های شبکه دانلود رایگان فایل سیمولینک پروژه در این شبیه سازی تاثیر مثبت وجود خطوط موازی در کاهش شدت جریان عبوری و مصرفی در برق گیر ها مورد مطالعه قرار گرفته است توضیحات مدار بدون خط موازی : این سیستم شامل شبیه سازی شبکه قدرت که دارای یک منبع ولتاژ 735 کیلو ولت استاندارد و یک امپدانس سری 3.6 اهم و سلف 95.5 میلی هانری می باشد که توسط خط انتقالی که دارای پارمترهای زیر می باشد: همان گونه که در شکل فوق دیده می شود طول خط 100 کیلومتر می باشد که تمامی پارامترهای خط از جمله ظرفیت خازنی و سلفی و مقاومت بر حسب کیلومتر برای تحلیل فورتیسکو بیان شده است. بر روی خط سه برق گیر برای هر فاز به طور مجزا نصب شده است . دلیل وجود خازن موازی هر برقگیر این است که در صورت عدم وجود این خازنها و به دلیل خاصیت ذاتی برقگیر که در زمان بدون فالت به صورت مدار باز عمل می کند عملا خط قطع خواهد شد به همین دلیل حتما باید در برق گیر سری یک عدد خازن هم نصب نمود در ادامه خط یک بار محلی در نظر گرفته شده است و در نهایت بار اصلی قرار داده شده است که خطا هم در همین محل روی داده است. برای جلوگیری از آسیب های ناشی از اتصال کوتاه می بایست خطا بلا فاصله پس از تشخیص توسط رله ها قطع گردند که این عمل توسط بریکر مورد مطالعه قرار گرفته است. جریان خطا : همانگونه که در شکل دیده می شود در لحظات اولیه یک جریان بسیار زیاد به عنوان خطا از شبکه کشیده شده است حالا به بررسی مقادیر جریان و ولتاژ هریک از برق گیر ها بدون خطوط موازی می پردازیم: این سیگنال نشان دهنده جریان عبوری از خط طی وقوع خطا یعنی از زمان تا 0.1 ثانیه است که بریکر خطا را قطع می نماید دیده می شود که جریان عبوری از در حد 5 کیلو آمپر است که در صورت عدم قطع می تواند آسیب جدی به ادوات بزند. همانگونه که در شکل مشهود است ولتاژ فاز C حین خطا به شدت کاهش یافته است که نتیجه اتصال کوتاه شدن برقگیر است و درضمن هر چه از زمان خطا گذشته است شدت ولتاژ نیز افت بیشتری نموده است. جریان برقگیرها موازی بار: همانگونه که در شکل دیده می شود از فاز C در لحظات خطا جریان بسیار زیادی از برقگیر عبور کرده است در ذیل می توان مقدار موثر این جریان را نیز مشاهده نمود: جریان برقگیرها موازی بار: همانگونه که در شکل دیده می شود از فاز C در لحظات خطا جریان بسیار زیادی از برقگیر عبور کرده است در ذیل می توان مقدار موثر این جریان ...
آموزش سیمولینک 5
جلسه پنجم آموزش سیمولینک در ادامهی آموزش Simulink ، مثالی رو مطرح میکنم که بیشتر با دقایق و ظرایف این نرم افزار آشنا شوید. فرض کنید سیستمی کنترلی دارید که تابع تبدیل آن در دسترس نیست و میخواهید مقدار ثابتزمانی این سیستم را بدست آورید. برای این منظور به ورودی سیستم، پله داده و ثابتزمانی را از روی خروجی سیستم اندازه میگیریم. حال پنجرهای جدید باز کرده و بلوکهای زیر را وارد آن کنید: Simulink >> Sources >> Step Simulink >> Sources >> Clock Simulink >> Sinks >> Stop Simulation Simulink >> Sinks >> Scope Simulink >> Continuous >> Transfer Fcn Simulink >> Sources >> Constant Simulink >> Sinks >> Display Simulink >> Logic and Bit Operations >> Relational Operator حال بلوکها را مانند شکل زیر مرتب کرده و سیم کشی کنید: تنظيمات بلوکها: روي بلوك Constant دوبار كليك نموده و مقدار آن را قرار دهيدروي بلوك Relational Operator دوبار كليك نموده و در قسمت Relational operator عملگر =< را انتخاب كنيدروي بلوك Step دوبار كليك نموده و مقدار Step time را 0 قرار دهيدروي بلوك Transfer Fcn دوبار كليك نموده و مقدار Denominator coefficients را [6.748 1] قرار دهيدتنظيمات مدل: مقدار Max step size را 0.001 قرار دهیدحال میتوانید مدلتان را Run کنید: توضیح مدل: در واقع ما خروجی این سیستم را با مقدار مقایسه کردهایم و هرگاه که خروجی به این مقدار رسید، خروجی بلوک مقایسهگر 1 شده و بلوک Stop Simulation شبیهسازی را متوقف میکند. حال قطعا مقدار زمان شبیهسازی، برابر مقدار ثابتزمانی سیستم خواهد بود. در مثال بعدی میخواهم یک مدار مقسم فرکانس با فلیپ فلاپ T ایجاد کنم. آنطوری که من در کتابخانه سیمولینک گشتم، این FF وجود نداشت. پس مجبوریم از فلیپ فلاپ JK استفاده و دو پایه آن را بههم وصل کنیم. در این مدار ما از چهار عدد FF استفاده کردهایم در نتیجه در خروجی FFها بهترتیب سیگنالهایی با فرکانسهای 2/1 ، 4/1 ، 8/1 و 16/1 فرکانس ورودی خواهیم داشت. بلوکها: Simulink >> Sinks >> Scope Simulink >> Sinks >> Terminator Simulink >> Sources >> Constant Simulink >> Signal Attributes >> Data Type Conversion Simulink >> Simulink Extras >> Flip Flops >> Clock Simulink >> Simulink Extras >> Flip Flops >> J-K Flip-Flop حال بلوکها را مانند شکل مرتب کرده و سیمکشی کنید و تنظیمات لازمه را بر مبنای آنچه که در ادامه آمده است، اعمال کنید: تنظيمات بلوکها: روي بلوك Constant دوبار كليك نموده و در تب Signal Attributes نوع داده خروجی را boolean برگزینیدروي بلوك Clock دوبار كليك نموده و مقدار پریود آن را 0.2 قرار دهیدروي تمامی بلوكهای Data Type Conversion دوبار كليك نموده و در قسمت Output data type نوع دادهي خروجي را double انتخاب ...
اموزش سیمولینک (قسمت اول)
مرجع: http://mathworks.ir با عرض سلام خدمت دوستان عزيز قصد دارم در چند قسمت، نحوه كاركردن با Simulink رو به شما آموزش بدم پس اگه تا حالا با Simulink كار نكرديد و يا مشكلاتي در كاركردن با اون داريد ميتونيد با من همراه باشيد درصورتيكه پاسخ مشكلتون رو دريافت نكرديد ميتونيد در قسمت نظرات اون مشكل رو مطرح كنيد، اگه بلد بودم پاسختون رو ميدم. سيمولينك نرم افزاريه كه شما براي شبيهسازي سيستمهاي ديناميكي، ميتونيد از اون استفاده كنيد اين نرمافزار زيرمجموعه نرمافزار متلبه كه داراي كتابخانههاي زيادي در زمينه رشتههاي مختلف از جمله برق و مكانيكه. اگه ما نرمافزار متلب رو فصل مشترك رشتههاي مهندسي در محاسبات عددي بدونيم نرمافزار سيمولينك رو ميتونيم فصل مشترك رشتههاي مهندسي در زمينه نرمافزارهاي شبيهساز قرار بديم. براي شروع كار با سيموليك ابتدا از مسير File >> New >> Model يك مدل جديد ايجاد كنيد. اين مدل رو در شكل زير مشاهده ميكنيد. حالا شما بايد در اين مدل برحسب مسالهاي كه ميخواهيد حل كنيد عناصر مورد احتياج رو از كتابخانه سيمولينك به مدل مورد نظر انتقال دهيد. براي بازكردن كتابخانه سيمولينك، رو صفحه متلب عبارت simulink رو وارد كنيد و يا به روي دگمه نشان داده شده در شكل زير كه هم در صفحه اصلي متلب و هم در مدل ايجاد شده قرار دارد كليك كنيد. همونطور كه در كتابخانه سيمونيك مشاهده ميكنيد كتابخانههاي زيادي وجود داره كه هركس بنا به رشتهاي كه داره با اين كتابخانهها كار ميكنه مثلا كسي كه مكانيك خونده با قسمت مخابرات اون كاري نداره ولي آنچه كه مشترك بين كليه كاربران هستش يادگيري بلوكهاي كتابخانه اصلي سيموليكه كه من تا جائيكه بتونم سعي ميكنم با مثالهاي متنوع، بلوكهايي رو كه بيشتر به كار ميان براي شما شرح بدم. براي اولين مثال ميخواهيم از يك پالس، مشتق و انتگرال گرفته و روي يك اسكوپ به همراه سيگنال اصلي نمايش بديم بلوكهايي رو كه احتياج داريم عبارتند از: مولد پالس، انتگرالگير، مشتقگير، تسهيم كننده و بلوكي بسيار معروف به نام اسكوپ. اين بلوكها را در مسيرهاي زير ميتونيد بيابيد: Simulink >> Sources >> Pulse Generator Simulink >> Continuous >> Integrator Simulink >> Continuous >> Derivative Simulink >> Signal Routing >> Mux Simulink >> Sinks >> Scope نحوه آوردن بلوكها هم بسيار سادس شما ميتونيد روي بلوك مورد نظر كليك چپ كرده و بدون رها كردن آن، موس رو به درون مدل مربوطه ببريد و در جائيكه ميخواهيد بلوك رو قرار دهيد، موس رو رها كنيد(Drag and Drop) و يا اينكه روي بلوك ...
آموزش سیمولینک 6
سلام خدمت دوستان اين قسمت از آموزش سيمولينك ابتدا بنا به درخواست برخي از دوستان، يك معادلهي ديفرانسيل رو شبيهسازي ميكنيم. اين معادلهي ديفرانسيل ممكن است معادلهي هر نوع سيستمي باشد. حال فرض كنيد معادلهي سيستم ما بهشرح زير باشد: همانطور كه ميبينيد اين معادله از نوع درجه دو، و ورودي آن نيز پله است. شرايط اوليه براي متغيير خروجي، غير صفر ميباشد. حال براي شبيهسازي اين معادلهي ديفرانسيل به صورت بلوكي، و بدست آوردن خروجي، بهصورت زير عمل كنيد: طبق معمول ابتدا يك مدل جديد باز كرده و بلوكهاي مورد نياز را از مسيرهاي زير وارد آن ميكنيد: Simulink >> Sources >> Step Simulink >> Sources >> Constant Simulink >> Math Operations >> Sum Simulink >> Math Operations >> Gain Simulink >> Continuous >> Integrator Simulink >> Signal Routing >> Bus Creator Simulink >> Sinks >> Scope تنظيمات بلوکها: روي بلوك Step دوبار كليك نموده و مقدار Step time را 0 قرار دهيد.روي بلوك Constant دوبار كليك نموده و مقدارآن را 0.5 قرار دهيد.روي بلوك Gain دوبار كليك نموده و مقدارآن را 0.5 قرار دهيد.روي بلوك Gain2 دوبار كليك نموده و مقدارآن را 3 قرار دهيد.روي بلوك Sum دوبار كليك نموده و در قسمت List of signs علامت هاي --+| را وارد كنيد.روي بلوك Integrator دوبار كليك نموده و در قسمت Initial condition source حالت external را برگزينيد.تنظيمات مدل: مقدار Stop time را 20 ثانيه قرار دهيد. در مثال بعدي مدار بلوكي جالبي رو بهتون معرفي ميكنم كه بوسيلهي آن قادر خواهيد بود، ميزان تغييرات گام زماني حلگر سيمولينك را مشاهده كنيد. همانطور كه احتمالا ميدانيد، سيمولينك دو نوع حلگر گامثابت و گاممتغيير دارد كه پيشفرض آن بر روي گاممتغيير قرار داده شده است. هر كدام از اين حلگرها درجاي خودشان كاربرد دارند، اما براي اكثر مدلها پيشنهاد ميشود كه از حلگر گاممتغيير استفاده شود. اين حلگر بنا به نياز، ميزان گام زماني را بطور اتوماتيك تغيير ميدهد. حال براي پيادهسازي اين مدار بهصورت زير عمل كنيد:Simulink >> Sources >> Clock Simulink >> Math Operations >> Sum Simulink >> Discrete >> Memory Simulink >> Sinks >> Scope Simulink >> Sinks >> Display تنظيمات بلوکها: روي بلوك Sum دوبار كليك نموده و در قسمت List of signs علامت هاي +-| را وارد كنيد.حال مدلتان را Run کنید: همانطور كه مشاهده ميشود، حلگر سيمولينك اين مدل را با گام زماني ثابت 0.2 حل كرده است، در حالي كه نوع حلگر در حالت گاممتغيير قرار دارد.(چرا؟) اكنون با فشردن كليد Ctrl+E به صفحه تنظيمات مدل رفته و نوع حلگر را گامثابت انتخاب كرده ...