آموزش ساخت ماشين كنترلي
ربات
ربات ها ماشين هايي هستند كه به تقليد رفتار انسان ها يا حيوانات مي پردازند . انسان ها داراي جسم مي باشند و از ماهيچه براي حركت بدن ، حسگر براي دريافت اطلاعات محيط ، قدرت براي فعال كردن ماهيچه ها ، مغز براي پردازش اطلاعات حسگرها و دستور به ماهيچه ها و ويژگي هاي نامشهود ديگر مانند هوش و روحيه برخوردارند . به طور مشابه ربات ها نيز از ساختار قابل حركت ، موتورها ، حسگرهايي براي مشاهده محيط ، فعال ساز براي كنترل حركت ، منبع تغذيه و پردازنده / كامپيوتر براي كنترل رفتار و اجزاي خود برخوردار مي باشند . ربات هاي صنعتي بازوها يا ماشين هاي خودكار مكانيكي هستند كه توسط كامپيوتر كنترل شده و از آنها در خطوط مونتاژ كارخانه ها استفاده مي شود . وظايف آنها بازه وسيعي را از اتصال اجزاي بدنه اتومبيل تا قرار دادن يك قطعه بسيار كوچك در يك دستگاه الكترونيكي در بر مي گيرد .يك ربات صنعتي كه از شش مفصل برخوردار است ، شباهت بسيار زيادي به بازوي انسان دارد . اين شش اتصال در واقع معادل شانه ، آرنج و مچ هستند . هر كدام از اين اتصالات توسط يك موتور DC/AC كنترل مي شوند . خود اين موتورها توسط سيگنال هايي كه توسط كابل منتقل مي شود ، كنترل مي گردند .كامپيوتر كنترلي ربات شامل برنامه هايي است كه رفتار هر موتور را كنترل مي كند و بدين ترتيب ربات عمل مورد نياز را انجام مي دهد . براي حركت ربات ، اين رايانه ، موتورها و دريچه هاي مرتبط را فعال مي كند . ربات ها قابل برنامه ريزي جديد بوده و مي توان با برنامه ريزي جديد رفتار متفاوتي را از آنها انتظار داشت .برنامه يك ربات جوشكاري حاوي دستورات لازم در زمينه ميزان جريان برق و اعمال جريان براي المان جوشكاري ربات است تا بدين ترتيب بعنوان قطعات فلزي با قطرهاي مختلف را به هم جوش داد . حسگرهاي موجود ، اطلاعات محيطي را به صورت پسخورد در اختيار كامپيوتر كنترلي قرار مي دهند و آنها را قادر مي سازند تا عمليات ربات را مطابق با شرايط محيطي تنظيم كنند . كامپيوترها سيگنال هاي فرمان را به ابزار رباتيك ارسال مي نمايند و بدين ترتيب عمليات كارخانه كنترل مي گردد .مي توان ماشين هاي رباتيك را به گونه اي برنامه ريزي كرد كه وظايف مختلفي را انجام دهند و در نتيجه ربات ها مي توانند به منظور توليد محصولات مختلف ، مورد استفاده قرار گيرند . ربات هاي فوق در كارخانه هايي مورد استفاده قرار مي گيرند كه محصولات متنوعي را در دسته هاي كوچك توليد مي كنند و محصولات هر دسته با دسته ديگر فرق مي كند . ربات ها با سخت افزار فرآيند توليد ادغام مي شوند . پس از اينكه كار جاري خط توليد به پايان رسيد ، مي توان از اين ربات ها براي كار ديگر دوباره استفاده كرد ...
پاسخگویی به سئوالات و نظرات-بخش دوم

سئوالات و پاسخ هاي مربوطه : سئوال: برای ساخت رادیو از چه چیزی باید استفاده کنیم ؟(مدل و نام شرکت سازنده ماشین رو بگین) .جواب: برای تهیه رادیو کنترل ساده(۲ کاناله) همانطور که در بخش رادیو کنترل گفتم می تونید از ماشین های اسباب بازی کنترلی استفاده کنید و البته از همون مدلی که شکل اونو براتون گذاشتم و داراي شاسي بلند هست بهتره چون برد فرستنده و قدرت گيرنده اون زیادتر مي باشد،اين ماشين ها همگي ساخت چين هستند و مارك ثابت و مشخصي ندارند و از فروشگاههاي اسباب بازي مخصوصا اونايي كه از كيش این اجناس را وارد ميكنند به قيمت مناسب بخريد. سئوال: نقشه های با فرمت DXF را در کامپیوتر چگونه باید اجرا کرد؟جواب: براي باز كردن و ديدن و پرينت اين نقشه ها احتياج به نرم افزار اتوكد مي باشد كه مي بايست در كامپيوتر خود نصب كنيد. سئوال: وزن مدلی که ساخت آن در وبلاگ توضیح داده شده حدود چه قدر هست؟جواب: وزن مدلی که معرفی شده حدود ۳۰۰ گرم می باشد. سئوال: از کجا میشه در تهران یه ملخ واسه مدل تهیه کرد؟جواب: فروشگاه اوج پرواز به آدرس: کیلومتر 4 بزرگراه تهران کرج ـ روبروی پارک ارم ـ مرکز نمایش های هوایی تلفن: 44670407 سئوال: در مورد سیم پیچ L3 مدار فرستنده و L2 مدار گیرنده توضیح بدید.جواب: اين دو سيم پيچ كه در نقشه شماتيك مدار فرستنده و گيرنده هم نشان داده شده از ۷ دور سيم نمره 0.3 ميليمتر پيچيده شده بر روي هسته اي به قطر ۵ ميليمتر ساخته مي شوند. سئوال: نقشه ها را باید روی چه کاغذی پرینت کنیم؟ آدرس مغازه اي كه ماشين كنترلي ميشه خريد كجاست؟جواب: نقشه ها مخصوصا آنهايي كه با اتوکد باز مي شوند را بهتره که بر روی کاغذ معمولي 80 گرمي و در سایز A1 يا A0 پرينت بگيريد.در مورد خريد ماشين كنترلي هم در بالا توضيح داده شده است. سئوال: آیا هلیکوپتر را هم میشه خودمون بسازیم ؟از آرمیچر (موتور)های هلیکوپتر s010 در چه هواپیمایی میشه استفاده کرد؟جواب: بله ،هلیکوپتر را هم می توانید خودتان بسازید ولی مهم اینست که بتوانید آنرا هدایت کنید چون ساختار و عملکرد آن با هواپیما متفاوت است.مدل هليكوپتري كه آرميچر هاي آنرا ميخاهيد استفاده كنيد نمي شناسم ،براي استفاده در هواپيماي مدل بايد به دور موتور و وزن موتور توجه كنيد. سئوال: در مورد سیمهای سرور به بال ها توضیح بدهيد.جواب: در مورد اين موضوع در بخش هاي ساخت سروو موتور و سكان عمودي توضيح داده شده است.
تهیه رادیو کنترل برای هواپیمای مدل (بروز رسانی 15/11/87)

كنترل حركت در هواپيما هاي مدل توسط سيستم راديو كنترل انجام ميشود كه شامل بخش فرستنده و گيرنده مي باشد.امواج ارسال شده از فرستنده توسط مدار گيرنده دريافت و به صورت فرمان الكتريكي به سرووها منتقل و باعث حركت سطوح كنترلي و در نتيجه تغيير مسير مدل مي گردد. و اما راديو كنترل براي مدلي كه مي سازيد را يا بايد به صورت حاضري از فروشگاههاي مخصوص مدلهاي پروازي خريداري كنيد كه قيمت آن بسته يه تعداد كانالها و مدل و مارك كارخانه سازنده متغير مي باشد ولي معمولا يك ست راديو كنترل ۴ كاناله شامل فرستنده،گيرنده و ۳ يا ۴ عدد سروو حدود ۱۵۰ هزار تومان مي شود كه البته براي همه از جمله مبتديان قابل تهيه نيست و هزينه زيادي برايشان مي باشد. راه دیگر برای تهیه رادیو کنترل استفاده از فرستنده و گیرنده مدلهای حاضری دیگر مثل هواپیماها و ماشین های مدل ارزان قیمت میباشد که البته معمولا ۲ کاناله هستند که در شکلهای زیر نمونه هایی از آنها را مشاهده می کنید. البته تهیه رادیو کنترل ماشین های مدل راحتتر هست و ارزانتر هم تمام می شود و با قیمتی حدود ۷ یا ۸ هزار تومان می توانید یک ماشین رادیو کنترلی نسبتا خوب خریداری کنید که غیر از قسمت رادیو کنترل آن از موتور ها و بقیه قطعات آن هم می توانید استفاده نمایید.ولی در صورت امکان از مدلی که در زیر شکل آن دیده می شود تهیه کنید چون رادیو کنترل آن برد زیادی دارد و نقشه مدارات آن را هم بدست آورده ام و امکان بهبود و تغییرات نیز در آن وجود دارد. در این ماشین ها مدار فرستنده با ولتاژ ۳ ولت (۲ عدد باطری قلمی) و مدار گیرنده با ولتاژ ۹ ولت (۶ عدد باطری قلمی) کار میکند و بردی حدود ۳۰ متر را پوشش می دهد.برای استفاده از این رادیو کنترل جهت هواپیمای مدل اولین و مهمترین چیزی که می بایست تقویت کرد برد فرستنده هست که حداقل نیاز به ۷۰ تا ۱۰۰ متر می باشد. برای افزایش برد در یک فرستنده کنترل از راه دور ۲ راه وجود دارد ۱-افزایش طول آنتن۲- افزایش ولتاژ کار فرستنده رادیو کنترل.معمولا در ماشین های مدل از آنتن های مفتولی و فنری به طول حدود ۳۰ سانتی متر استفاده می شود که البته برای استفاده مورد نظر ما کم می باشد و باید از آنتن های تلسکوپی به طول ۷۰ تا ۱۰۰ سانتی متر استفاده کنید که براحتی و از فروشگاههای فروش لوازم و قطعات الکتریکی و به قیمتی حدود ۱۰۰۰ تومان قابل تهیه می باشد.همچنين به انتهاي آن يك روبان قرمز رنگ به طول حدود ۳۰ سانتي متر ببنديد كه براي مشخص شدن جهت وزش باد در موقع پرواز دادن مدل مفيد مي باشد. در مورد افزایش ولتاژ تغذیه مدار فرستنده ...
اموزش ساخت یه رادیو کنترل ساده و کوچک!!!
اما کم کم طراحی رو شروع کنیم:با مراجعه به دیتاشیت آی سی اول می بینیم که تمام شماتیک مدار مورد نظرمون یعنی همون فرستنده مادون قرمز یا Remote Control اونجا هست و هیچ نیازی به این نیست که تغییراتی رو اعمال کنیم.صرفا مساله طراحی PCB می مونه که از این بحث خارجه.و اما شماتیک:همونطور که توی این شماتیک می بینید ما می تونیم یه ریموت کنترل 18 کلیده داشته یاشیم که کلید ها بصورت ماتریسی روی آی سی قرار می گیرند.و بصورت سه سطر در شش ستون چیده می شند.در مورد R توی شماتیک (روی بیس ترانزیستور) مقاومت 680 یا 820 اهم رو انتخاب می کنیم.و همچنین در مورد ترانزیستور 2SA1015 انتخاب میشه.IR LED رو هم که میدونید یه LED مادون قرمز معمولی فرستنده (شفاف) میندازیم.فکر نمی کنم در مورد مدار فرستنده دیگه مشکلی وجود داشته باشه بجز اینکه رنج تغذیه مدار بسیار جالب هستش... 2.2 ولت تا 5 ولت.پس به راحتی می تونید از باتریهای معمولی که توی این رنج ولتاژ هستند استفاده کنید.و اما مدار گیرنده.با مراجعه به دیتا شیت این آی سی چیز زیادی جز نحوه بستن تغذیه آی سی و پین های کنترلی دستگیرمون نمیشه.اینجا یه نکته پیش میاد و اون اینکه از حالا باید نیاز خودتون رو تعیین کنید.به این معنی که باید بدونید به 10 کانال نیاز دارید یا 18 تا.چون برای داشتن 10 کانال باید از آی سی PT2249 و برای داشتن 18 کانال از آی سی PT2250 استفاده کنید.فعلا شماتیک های مربوط به هرکدوم رو که از دیتاشیت بیرون کشیدم رو ببینین:همونطوری که توی شکل ها می بینید پین هایی از آی سی ها که توی قسمت Control Signal Output قرار گرفتن پین های مربوط به خروجی های مدار ما هستند که توی اولی دو تا و در دومی 18 تا هستن.سلام مجدد.خوب میرسیم به قسمت طراحی:این آی سی و به عبارتی مدار گیرنده ما سه قسمت عمده داره:1-قسمت تغذیه آی سی2-قسمت گیرنده یا همون سنسور مادون قرمز3-خروجی مداربرای هرکدوم جدا گانه طراحی رو انجام میدیم.بیاید اول از قسمت خروجی شروع کنیم.چون هم از اون دوتای دیگه کار بیشتری میبره و هم سخت تره.(حالا میگم چرا)برای این کار قبل از هرچیز باید بدونیم که خروجی ما هر به هرالمان الکتریکی و الکترونیکی که قدرت سوئیچ کردن یا فرمان دادن رو داشته باشه میتونه وصل شه.از جمله رله ، ترانزیستور ، تریاک ، میکرو و...اما بیاید فرض کنیم که میخوایم این خروجی ها رو به رله بدیم.یا یکم عامیانه ترش اینکه فرضا می خوایم وسایلی مث لامپ های خونه یا تلوزیون و ... رو خاموش و روشن کنیم.بقیه المانهای مورد اشاره هم برای وصل شدن به آی سی مشکلی ندارن.ولی حالا بریم روی مدار:همونطور که می بینید یک دونه از مدار مربوطه رو روی پین 13 کشیدم و بقیه پین ها رو بعهده خودتون گذاشتم.درواقع همه پینها ...
طراحی مینی ماشین کنترلی پر قدرت
طراحی مینی ماشین کنترلی پر قدرت ماشين كنترلي Traxxas XO-1 اگرچه ظاهري شبيه اسباببازي دارد، اما براي كودكان طراحي نشده و قادر است در كمتر از پنج ثانيه از شتاب صفر تا 160 كيلومتر در ساعت برسد. ميني ماشين پر قدرت Traxxas XO-1 تنها 4.5 كيلوگرم وزن دارد و طول آن 68 سانتي متر است كه مي تواند در 2.3 ثانيه از شتاب صفر به 96 كيلومتر در ساعت برسد. ماشين كنترلي قابليت اندازهگيري سرعت، دور در دقيقه، دما و عمر باتري را دارد. حسگرهايي بر روي ماشين نصب شده است كه اطلاعات لحظه اي را به تلفن همراه كاربر ارسال مي كند؛ برد فرستنده و دستگاه كنترل از راه دور نيز ارتقاء يافته و مدت زمان كاركرد باتري نيز 15 دقيقه است. درحاليكه خودروي لوكس بوگاتي ويرون با سرعت 321 كيلومتر در ساعت به قيمت يك ميليون دلار فروخته مي شود، ميني ماشين كنترلي پرقدرت Traxxas XO-1 با قيمت يك هزار و 100 دلار به بازار عرضه شده است.
آموزش ساخت ربات (3)
انواع موتور و درايورهاي آنها موتور AC موتور DC موتور پلهاي (Stepper motor) موتور : از موتور براي تبديل انرژي الكتريكي به انرژي مكانيكي استفاده ميشود. انتخاب نوع موتور مورد استفاده به نوع كاربرد و ويژگيهاي هر موتور بستگي دارد. موتور AC : معمولاً در مدارهايي با مصرف انرژي زياد و دستگاههاي الكتريكي خانگي مورد استفاده قرار ميگيرد. اين موتورها با جريان متناوب برق كار ميكنند لذا به آنها موتور AC گفته ميشود. يخچال، جاروبرقي و آبميوهگيري موتور ACدارند. براي كنترل ميزان چرخش موتور از وسيلهاي بنام شفت انكودر استفاده ميشود. موتور DC: توان مكانيكي آنها عموماً كمتر از موتورهاي AC است. ساختار سادهاي دارند. بسياري از اسباب بازيهاي برقي با موتور DC كار ميكنند. بسياري از اسباب بازيهاي برقي با موتور DC كار ميكنند اغلب براي استفاده از موتورDC به مدار راهانداز نياز داريم. آرميچر بارزترين نوع موتور DC است. ايراد موتور DC عدم امكان كنترل دقيق سرعت و چرخش موتور است. قيمت پايين، تنوع قدرت و سرعت، از جمله مزاياي استفاده از موتورهاي DC ميباشد. موتور پلهاي (Stepper motor) كاربرد اصلي اين موتورها در كنترل موقعيت است. اين موتورها ساختار كنترلي سادهاي دارند. لذا در ساخت ربات كاربرد زيادي دارند. مطابق با تعداد پالسهايي كه به يكي از پايههاي راهانداز موتور ارسال ميشود موتور به چپ يا راست ميچرخد. توان خروجي اين موتورها كمتر از دو نوع قبلي است. استفاده از موتور پلهاي مشکلاتي از جمله وزن زياد، قيمت بالا و قدرت بسيار کم را بدنبال دارد. موتور پلهاي نسبت به دو موتور قبلي داراي حرکت دقيق و حساب شده تري هستند. اين موتورها به صورت درجه اي دوران مي کنند و با درجه هاي مختلف در بازار موجود هستند.واژه پله به معني چرخش به اندازه درجه تعريف شده موتور اطلاق مي شود. ۳۶۰ = ۱/۸* ۲۰۰ ۳۶۰= ۲۴* ۱۵ چرخش موتور پله اي موتور پله كامل و نيم پله در حالت عادي ميزان چرخش موتور به تعداد پالسهاي اعمالي و گام موتور بستگي دارد. هر پالس يك پله موتور را ميچرخاند. با تحريك دو فاز مجاور در موتور ميتوان موتور را به اندازه نيم پله حركت داد. به اين ترتيب تعداد پلهاي موتور دو برابر ميشود. راه اندازي موتور پلهاي موتور ديسك سخت يك نمونه موتور پلهاي است.تراشه L297 يك راه انداز مناسب براي موتور پلهاي است. مقايسه موتور DCو موتور پلهاي موتور پله اي موتور DCاستفاده در توانهاي پايين استفاده در توانهاي بالاراه اندازي پيچيده راه اندازي سادهبدون نياز به سامانه كنترلي كنترل با فيد بكتعمير ونگهداري ساده وكم تعمير ونگهداري مداوم معرفی ...
1معرفی رشته های دانشگاهی در ایران.مهندسی مکانیک
مهندسی مکانیک هدف : الف – گرايش مكانيك در طراحي جامدات هدف تربيت آزمايشگاهي متخصصاني است كه بتوانند در مراكز توليد و كارخانهها اجزاء و مكانيزم ماشينآلات مختلف را طراحي كنند. دروس اين دوره شامل دروس نظري، آزمايشگاهي، كارگاه و پروژه و كارآموزي است. فارغالتحصيلان ميتوانند در كارخانجات مختلف نظير خودروسازي ، صنايع نفت، ذوب فلزات و صنايع غذايي و غيره مشغول شوند و براي اين دوره امكان ادامه تحصيل تا سطح كارشناسي ارشد و دكتري در داخل يا خارج از كشور وجود دارد. موفقيت داوطلبان به آگاهي آنها در دروس جبر و مثلثات، هندسه ، فيزيك و مكانيك همچنين آشنايي و تسلط آنان به زبان خارجي بستگي فراوان دارد. از جمله دروس اين دوره ميتوان دروس مقاومت مصالح، طراحي و ديناميك را نام برد. در اين رشته زمينه اشتغال و بازاركار خوب وجود دارد و مطالب ارائه شده در طول تحصيل براي دانشجويان محسوس و قابل لمس است. ب – گرايش مكانيك در حرارت و سيالات اين رشته در به كاربردن علوم و تكنولوژي مربوط جهت طرح و محاسبه اجزاء سيستمهايي كه اساس كار آنها مبتني بر تبديل انرژي ، انتقال حرارت و جرم است به متخصصان كارآيي لازم را ميدهد و آنها را جهت فعاليت در صنايع مختلف مكانيك در رشته حرارت و سيالات (نظير مولدهاي حرارتي، انتقال سيال نيروگاههاي آبي، موتورهاي احتراقي و ... ) آماده ميسازد. فارغالتحصيلان اين دوره قادر به طراحي و محاسبه اجزا و سيستمها در بخشهاي عمدهاي از صنايع نظير صنايع خودروسازي ، نيروگاههاي حرارتي و آبي، صنايع غذايي، نفت، ذوب فلزات و غيره هستند. فارغالتحصيلان اين دوره ميتوانند تا مقطع كارشناسي ارشد و دكتري در داخل يا خارج از كشور ادامه تحصيل دهند. داوطلبان اين رشته بايد در دروس رياضي و فيزيك تسلط داشته و با يك زبان خارجي آشنا باشند. دروس اين رشته شامل مطالبي در زمينههاي حرارت و سيالات ، ميباشد. نظر دانشجويان: با توجه به اينكه اصولا تحصيلات دانشگاهي به خصوص در زمينههاي مهندسي نياز صد در صد به علاقهمندي داوطلب دارد، بنابراين عدم داشتن علاقه و همچنين عدم تقويت دروس اساسي و پايهاي در بخش مكانيك مانند رياضي، فيزيك – مكانيك ، شيمي ، رسم فني (تجسم بالا داشتن) و هوش نسبتا خوب و عدم روحيه تجزيه و تحليل در مسائل باعث دلسردي و از دستدادن انگيزه تحصيل و ركورد شديد در تحصيلات خواهد شد. ج - گرايش ساخت و توليد هدف تربيت كارشناساني است كه با به كاربردن تكنولوژي مربوط به ابزارسازي، ريختهگري ، جوشكاري، فرم دادن فلزات ، طرح كارگاه يا كارخانههاي توليدي آماده كار در زمينه ساخت و توليد ماشينآلات صنايع (كشاورزي ، نظامي، ...
جزوه ماشين هاي الكتريكي 1 دكتر عابدي
سايت www.powerproject.ir آمادگي انجام كليه پروژههاي شما در رشتههاي برق قدرت و كنترل و پردازش تصوير و انجام پروژه هاي ميكروكنترلر را دارد. براي تماس با ما از طريق Email و يا شماره تماس درج شده، اقدام فرماييد.www.powerproject.irEmail: [email protected]: [email protected]: 09374305423دانلود جزوه ماشين 1 دكتر عابدي
جعبه دنده متوالی
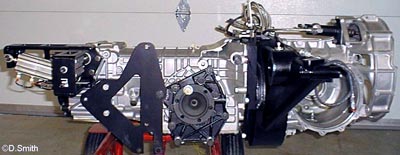
جعبه دنده متوالی: اگر مقاله سيستم انتقال قدرت دستي را مطالعه كرده باشيد حتما در مورد كارهاي داخلي سيستم دستي اطلاعاتي را كسب كردهايد و همچنين فهميدهايد كه چرا در سيستم دستي از الگوي "H" براي تعويض دنده استفاده شده است. اگر تا به حال با موتور سيكلت رانندگي كرده باشيد حتما دريافتهايد كه سيستم انتقال قدرت در موتور سيكلت اينگونه عمل نميكند بلكه براي تعويض دنده بايد به وسيله پا اهرمي را به طرف بالا و يا پايين فشار دهيد.اين راه براي تعويض دنده بسيار سريعنر است.اين نوع سيستم انتقال قدرت "جعبه دنده متوالي" يا "سيستم انتقال قدرت دستي متوالي"ناميده ميشود. از آنجاييكه عمل تعويض دنده در اين سيستم بسيار سريعتر انجام ميگيرد و محاسن مهم ديگري را در اختيار راننده قرار ميدهد در بيشتر ماشينهاي مسابقه از آن استفاده ميشود.در اين مقاله به اين محاسن خواهيم پرداخت. در اين مقاله خواهيم آموخت كه سيستم انتقال قدرت متوالي چگونه كار ميكند و چرا در ماشينهاي با كيفيت بالا از اين سيستم استفاده ميشود. درون جعبهدنده متوالی: مقاله سيستم انتقال قدرت دستي اطلاعات مهم و اساسي را در مورد مكانيزم داخلي سيستم انتقال قدرت دستي به شما ميدهد. يك سيستم پنج دنده كه به صورت استاندارد در ماشينهاي امروزه استفاده ميشود داراي مكانيزمي شبيه شكل زير است: سه چنگال به وسيله اهرم تعويض دنده و به واسطه سه ميله كنترل درگير ميشوند.اگر از بالا به ميلههاي تعويض دنده نگاه كنيم در حالتهاي خلاص و دنده عقب و دنده يك و دو آنها را شبيه به شكل زير ميبينيم: الگوي H اين امكان را فراهم ميكند كه ميله تعويض دنده بين ميلههاي كنترل حركت كند تا سه چنگال را به حركت در آورد و ميلهها را به جلو وا يا عقب حركت دهد. سيستم انتقال قدرت دستي متوالي هم اينگونه عمل ميكند در اين سيتم هم يك دسته چنگال وجود دارد كه طوقههاي مخصوص درگير كردن دندهها را حركت ميدهند. تفاوت این دو سیسم در شيوه كنترل ميلهها است الگوي H كنار گذاشته شده است و به جاي آن از حركت ديگري استفاده ميشود. در ماشينهاي مسابقه با حركت اهرمي به طرف جلو ماشين به دنده بالاتري ميرود و با حركت به طرف عقب دنده كاهش مييابد.فرض كنيد ماشين شما در دنده 2 است و ميخواهيد به دنده 3 برويد براي اين كار بايد اهرم تعويض دنده را به طرف جلو فشار دهيد و براي رفتن از دنده 3 به 4 بايد بار ديگر اهرم را به طرف جلو فشار دهيد و به همين ترتيب حركت در هر مورد ثابت است . اگر بخواهيد به دنده پايينتري بياييد مثلا از دنده 5 به 4 بايد اهرم را به طرف عقب بكشيد.در ماشينهايي كه در اروپا ...