جزوه سیستم های کنترل خطی (دانشگاه منتظری مشهد)
انواع سیستم کنترل:
کنترل فرآیند: سیستمهایی که در آن ورودی دارای تغییرات نسبتا کند و در یک محدوده مشخص هستند و عامل اغتشاش تاثیر زیادی بر پروسه دارد سیستمهای کنترل فرایند نامیده میشوند. (مانند: پروسه کنترل دما، کنترل رطوبت، کنترل نور و…)
سرو مکانیزم: سیستمهایی هستند که در آنها خروجی مورد نظر، سرعت یا موقعیت یا گشتاور است در این گونه سیستمها تغییرات خیلی سریع و دامنه نا مشخصی دارد.
انواع فیدبک:
در سیستمهای حلقه بسته فیدبک می تواند بصورت مثبت یا منفی باشد و در سیستمهای کنترل فیدبک مثبت باعث ناپایداری و انهدام سیستمها می شود بنابراین همواره از فیدبک منفی استفاده می شود.
اجزا اصلی یک سیستم کنترل:
بطور کلی برای هر سیستم می توان سه جز اصلی در نظر گرفت که عبارتند از:
۱- سنسور
۲- کنترلر
۳- محرک
سنسور مانند چشم در یک سیستم کنترلی عمل میکند.کنترلر بمانند مغز و محرکها بازوان یک سیستم کنترلی هستند.
کنترل کننده ها:
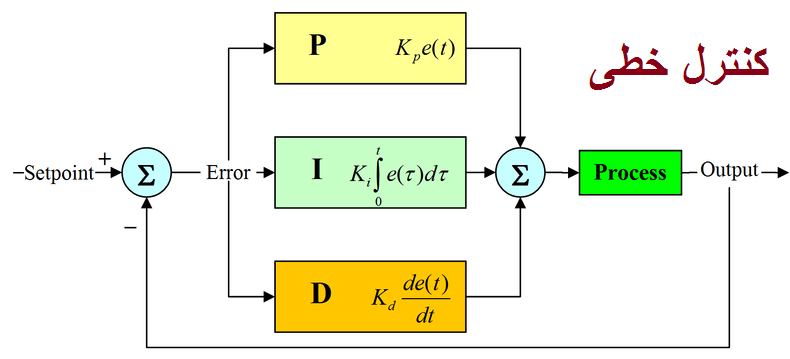
کنترل کننده ابزاری است که با توجه به خطای موجود ( اختلاف رفتار پروسه با رفتار مطلوب ) و با در نظر گرفتن قوانین کنترل که طراح به آن یاد داده است. دستوری را جهت اصلاح و هدایت پروسه به آن اعمال می کند.
کنترل کننده ها از نظر مورد استفاده به سه دسته الکتریکی، پنوماتیکی و هیدرولیکی تقسیم می شوند و از نظر قانون کنترل دارای انواع زیر هستند.
۱- دو وضعیتی (on-off)
2- تناسبی (proportional)
3- انتگرالی (integral)
4- مشتقی (derivative)
5- تناسبی مشتقی PD
6- تناسبی انتگرالی PL
7- تناسبی انتگرالی مشتقی PID
سرفصلهای جزوه سیستم های کنترل خطی…
فصل اول: آشنایی با سیستمهای کنترل
تعاریف اولیه سیستمهای کنترل خطی
انواع سیستم کنترل
انواع سیستم کنترل از نظر استراتژی کنترل
انواع فیدبک
اجزا اصلی یک سیستم کنترل
تبدیل لاپلاس
تجزیه کسر به عاملهای اول بصورت گرافیکی
فصل دوم: مدلسازی ریاضی سیستمهای فیزیکی
روشهای نمایش و مدل کردن سیستمهای کنترلی
نمایش به صورت HODE
انواع متغییرها در سیستمهای فیزیکی
خواص سیستمهای خطی
خطی کردن سیستمهای کنترل حول نقطه کار
نمایش سیستم بصورت TF
تابع تبدیل
دیاگرام بلوکی
فرآیندهای الکترومکانیکی
نمودار گذر سیگنال
فصل سوم: مدلهای متغییر حالت برای سیستمهای فیزیکی
نمایش سیستمها بصورت فضای حالت یا state-space
فرم کلی نمایش متغییرهای حالت
حل معادلات حالت و ماتریس انتقال(گذرا) حالت (state transition matrix)
تعریف ماتریس انتقال حالت
دستیابی به تابع تبدیل از معادلات حالت
نمودار حالت SD
تبدیل معادله دیفرانسیل به نمودار حالت
تبدیل نمودار حالت به تابع تبدیل
تبدیل نمودار حالت به معدلات حالت
فصل چهارم: مشخصات سیستم کنترل پسخوردی
کاهش اثر اغتشاش
کاهش حساسیت سیستم به تغییرات بهره
بهبود پاسخ گذرا
فصل پنجم: پاسخ زمانی سیستمهای کنترل
تحلیل سیستمهای کنترل در حوزه زمان
سیگنالهای آزمون ورودی برای پاسخ زمانی سیستمهای کنترل در حوزه زمان
تحلیل پاسخ زمانی سیستمهای کنترل براساس موقعیت قطبها
پاسخ ضربه به یک سیستم مرتبه اول
نمایش قطبها در صفحه مختلط
پاسخ پله به یک سیستم مرتبه اول
پاسخ سیستمهای مرتبه دوم به ورودی پله
تشریح حرکت قطب
خطای حالت مانا در سیستمهای کنترل خطی
تعریف خطا براساس آرایش سیستم
نوع سیستمهای کنترل خطی
خطای حالت مانا به ورودی پله
خطای حالت مانا به ورودی شیب
خطای حالت مانا به ورودی سهموی واحد
محک پایداری راث – هرویتز
حالتهای خاص در محک راث هرویتز
فصل ششم: کنترل کنندهها
کنترل کننده دو وضعیتی
کنترل کننده تناسبی
کنترل کننده تناسبی بایاس دار
کنترل کننده انتگرالی
کنترل کننده مشتقی
کنترل کننده PL
کنترل کننده PD
کنترل کننده PID
رمز فایل:www.wikipower.ir
مطالب مشابه :
جزوه سیستم های کنترل خطی (دانشگاه منتظری مشهد)
انواع سیستم کنترل: کنترل فرآیند: سیستمهایی که در آن ورودی دارای تغییرات نسبتا کند و در یک
رله کنترل فاز
مهندسی برق قدرت و پایان نامه برق قدرت - رله کنترل فاز - پایان نامه.برق قدرت.برنامه نويسي plc
دانلود جزوه کامل مدار فرمان
پایان نامه.برق قدرت.برنامه نويسي plc.ميكروكنترلرها پایان نامه برق کنترل پایان
رله ی کنترل فاز و طریقه ی نصب آن
کاربرد. رله اضافه جریان سه فاز (کنترل بار) جایگزینی مناسب برای رله های بی متال است که در
سرو موتور
پایان نامه.برق قدرت.برنامه نويسي plc.ميكروكنترلرها پایان نامه برق کنترل پایان
لیست اول پایان نامه های کارشناسی و کارشناسی ارشد برق
پایان نامه.برق قدرت.برنامه نويسي plc.ميكروكنترلرها پایان نامه برق کنترل پایان
پایان نامه آسانسور و بررسی موتورهای آن
پایان نامه.برق قدرت.برنامه نويسي plc.ميكروكنترلرها پایان نامه برق کنترل پایان
جزوه کنترل صنعتی
مهندسی برق قدرت و پایان نامه برق قدرت - جزوه کنترل صنعتی - پایان نامه.برق قدرت.برنامه نويسي plc
برچسب :
پایان نامه برق کنترل